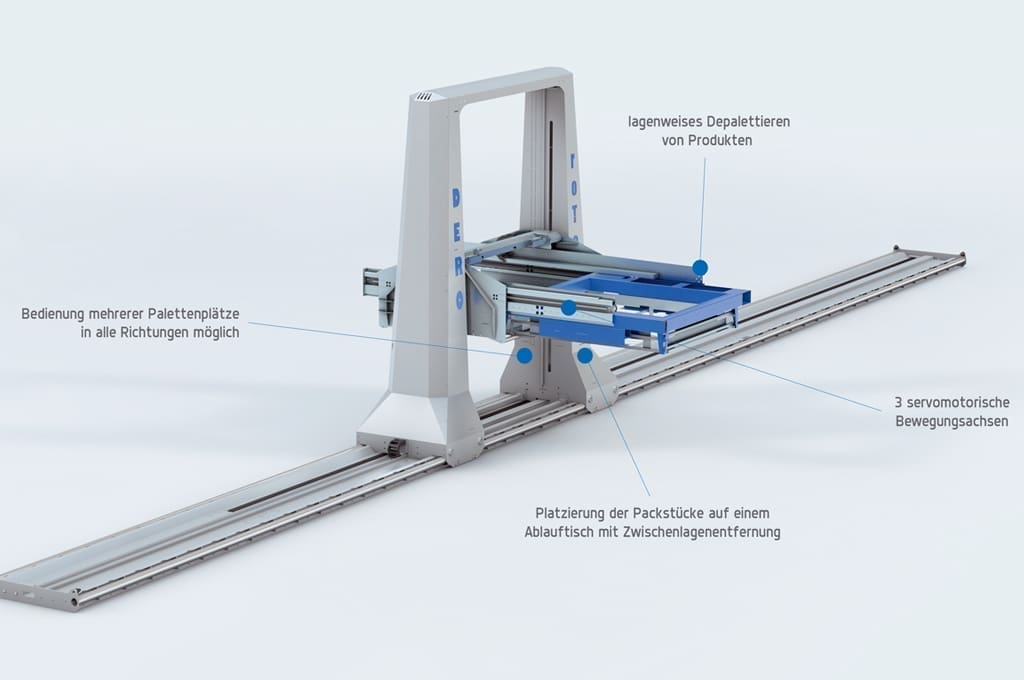
3-Achsen-Prinzip:
Mit seinen drei Bewegungsachsen positioniert der Roboter die Packstücklagen sicher auf einem Ablauftisch und entfernt gleichzeitig die Zwischenlagen. Dabei arbeitet der roTeg-Depalettierroboter II mit einem Greifer, der zunächst die obere Packstücklage umschließt und durch Klemmbacken zentriert. Die gesamte Lage wird auf ein integriertes Überschubblech gezogen. Am Ablauftisch wird die Lage zurückgeschoben. Vorhandene Zwischenlagen nimmt der Roboter durch ein Saugsystem auf und legt sie in einem separaten Magazin ab.
Immer auf Achse: Der roTeg-Depalettierroboter II für die Depalettierung beliebig vieler Palettenplätze.
Für variable Packstückdurchmesser:
Selbst verschiedene Packstückdurchmesser kann der roTeg-Depalettierroboter II problemlos depalettieren, da der Zentrierrahmen des Greifsystems die ganze Lage umschließt. Weil die Fixierung ohne äußeren Druck auskommt, wird das Material besonders schonend gehandhabt.
Wartungsarme und robuste Bauweise:
Bei der Entwicklung des Systems wurde auf die Verwendung wartungsarmer Bauteile großen Wert gelegt. So werden die drei Achsen von wartungsfreien Servomotoren angetrieben. Die stabile und einfache Kinematik sorgt für minimale Instandhaltungskosten.